超声波液位传感器与LLC010N红外单点光电液位开关在水下机器人上的集成应用方案
2025/12/20 10:23:58
暂无图片。
详细介绍
水下机器人在海底结构检测、环境监测、资源勘探等任务中,需实时感知液位高度以实现精准作业。传统机械式液位传感器易受海水腐蚀、生物附着影响,而超声波液位传感器与红外光电液位开关凭借非接触式检测、高可靠性及环境适应性,成为水下机器人液位监测的核心组件。本方案结合超声波传感器与LLC010N红外单点光电液位开关,构建冗余液位监测系统,满足水下机器人对精度、实时性与安全性的严苛要求。
核心传感器技术解析
(一)超声波液位传感器
工作原理
通过发射200kHz超声波脉冲,利用声波在空气与液体界面的反射特性,计算声波往返时间(T)与液位高度(H)的关系:
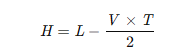
其中,L为传感器安装高度,V为声速(受温度补偿自动修正)。
技术优势
非接触式检测:避免海水腐蚀与生物附着,延长传感器寿命。
宽温度适应性:工作温度范围-20℃至60℃,适配深海低温环境。
多信号输出:支持4-20mA电流环与RS485(Modbus协议),便于与主控系统集成。
静管技术:窄声束角(5cm)抑制水面波动干扰,提升测量稳定性。
(二)LLC010N红外单点光电液位开关
工作原理
LLC010N基于红外光折射原理,当液位低于传感器位置时,发射管发出的光线经透镜折射后进入液体,接收管信号减弱;液位高于传感器时,光线直接反射至接收管,触发开关信号。其响应时间<10ms,支持NPN/PNP输出,可快速响应液位异常。
技术优势
高可靠性:无机械运动部件,耐海水腐蚀(探头材质为聚砜树脂),寿命超5年。
低功耗设计:工作电流<12mA(24V供电),适配电池供电的水下机器人。
紧凑结构:体积小,易集成于机器人狭窄空间。
多电压兼容:支持5-28V宽电压输入,适应不同电源系统。